ANSA人体模型姿态调整工具的使用案例
来源:BETA CAE Systems
中国体征人体数字模型(AC-HUMs)是中国汽研主持研发的人体有限元模型。BETA CAE Systems与中国汽研保持紧密合作,前、后处理软件(ANSA/META)会全面支持AC-HUMs系列模型。在软件中提供对应工具用于人体模型的姿态变换,体征缩放,结果响应提取等。
本文将以AC-HUMs AM50乘员模型为例子,介绍使用ANSA的人体模型姿态调整工具(HBM Articulation Tool)进行定位的过程。
首先,在使用工具前需要准备好对应的metadata文件,该文件用于生成人体关节的运动机构,大家可以发邮件到 betacn.support@cadence.com获取该文件。关于metadata文件以及人体模型姿态调整工具可以查看以往的文章查询更多细节,在本文中只提供必要的步骤描述。
步骤 1
将模型导入ANSA之后,打开Safety>Human Body Model>Articulation工具,并从Biofidelic Moves下面的Metadata选项卡中,打开读取对应的metadata文件。
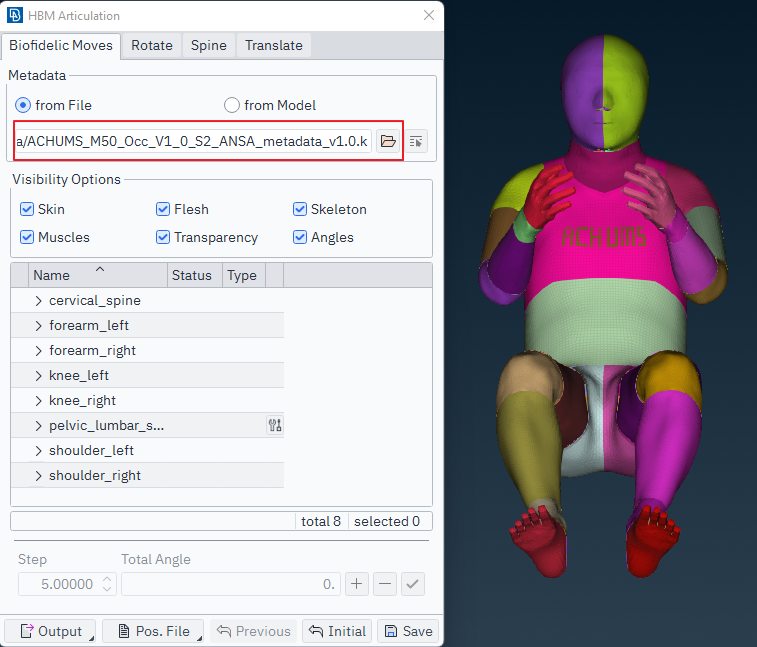
图1 读取metadata文件
步骤 2
在工具中去到Translate界面,此时会自动激活选择模式,选择座椅参考点。选择完毕后点击对号,人体模型会自动将H点匹配到座椅参考点上。若人体模型的朝向不一致,可以去到Rotate界面,选择torso_tree将模型整体围绕H点进行旋转,以调整成正确朝向。
图2 Translate界面
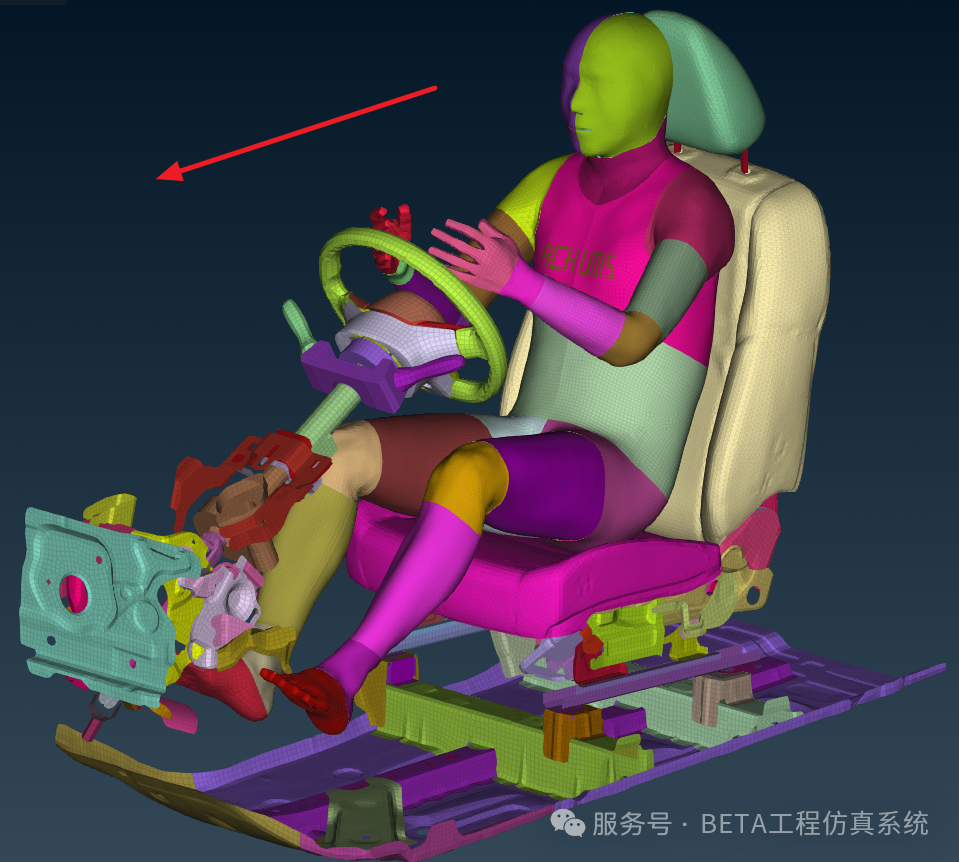
图3 H点匹配以及朝向转换完毕
步骤 3
接下来需要先定义上躯干角,去到Rotate界面中,通过torso_tree关节里面的R轴来定义前倾/后倾角度。输入负值为前倾,正值则为后仰。示例中我们输入-13,进行前倾13°。S跟T轴分别控制人体左右倾斜以及转身动作,按实际情况调整即可。
图4 围绕H点旋转
步骤4
去到Biofidelic Moves界面中进行脊柱角度的调整。去到pelvic_lumbar_spine,输入10,此时会通过颈椎上仰10°带动腰椎进行随动调整,使整个脊柱曲线改变。
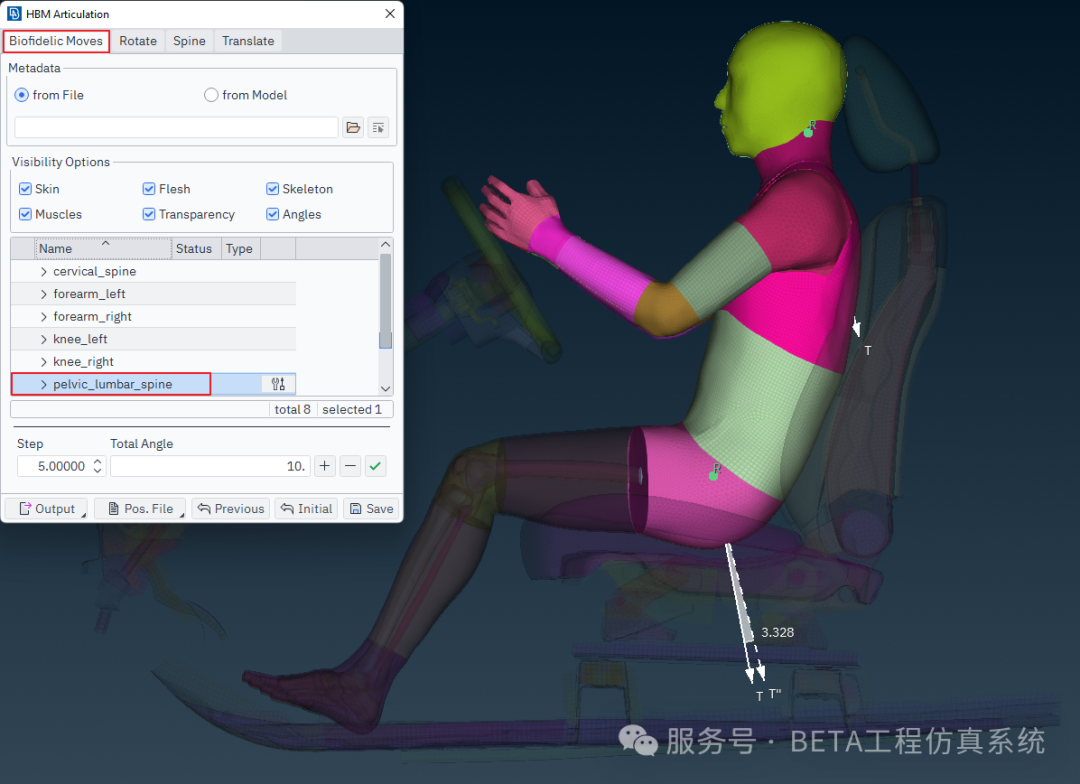
图5 脊柱调节示意图1
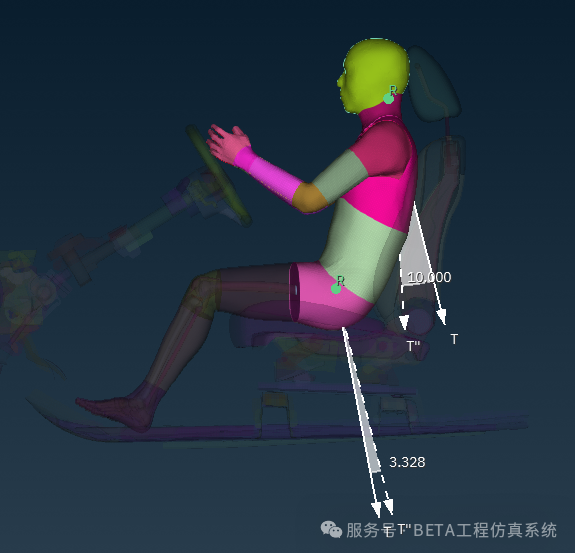
图6 脊柱调节示意图2
步骤 5
通过cervical_spine只调整颈部角度,输入负值为前倾,正值则为后仰。在本示例中输入-1,只做略微调整。
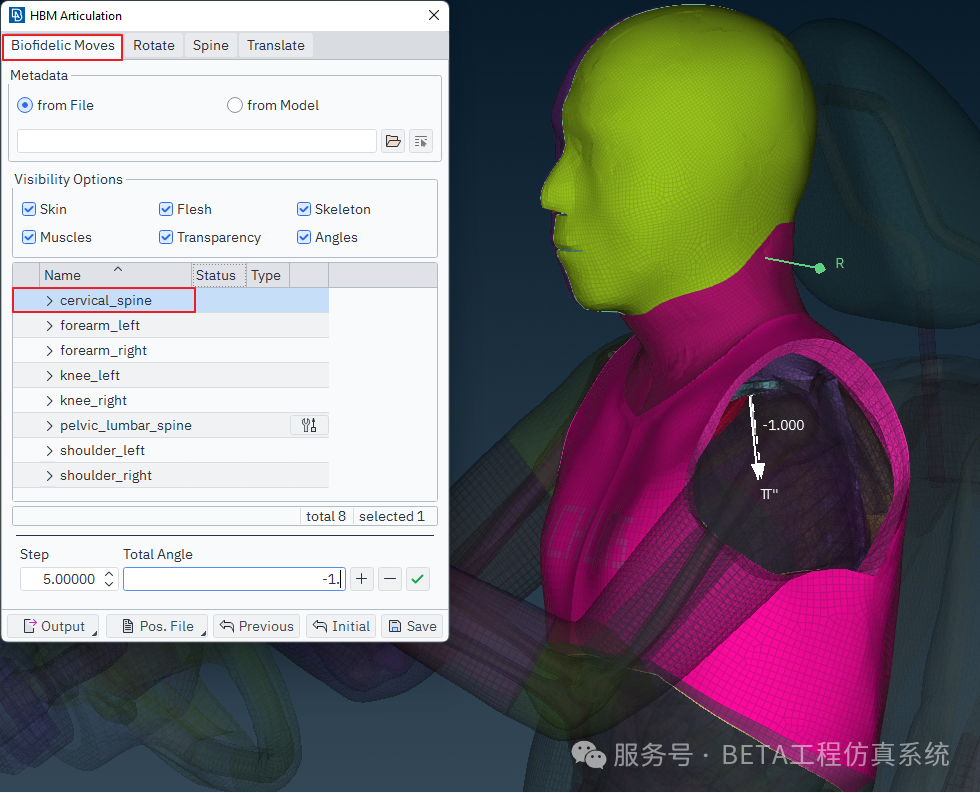
图7 颈部调节
步骤 6
接下来去定义手部,涉及到的关节有肩部,肘部,手腕以及手指,需要进行观察并多次尝试角度以得到最佳结果。
先在Biofidelic Moves界面中,使用shoulder以及forearm关节进行大致位置的调整。如右手部位所示,将肩部调整10°以及肘部调整20°。
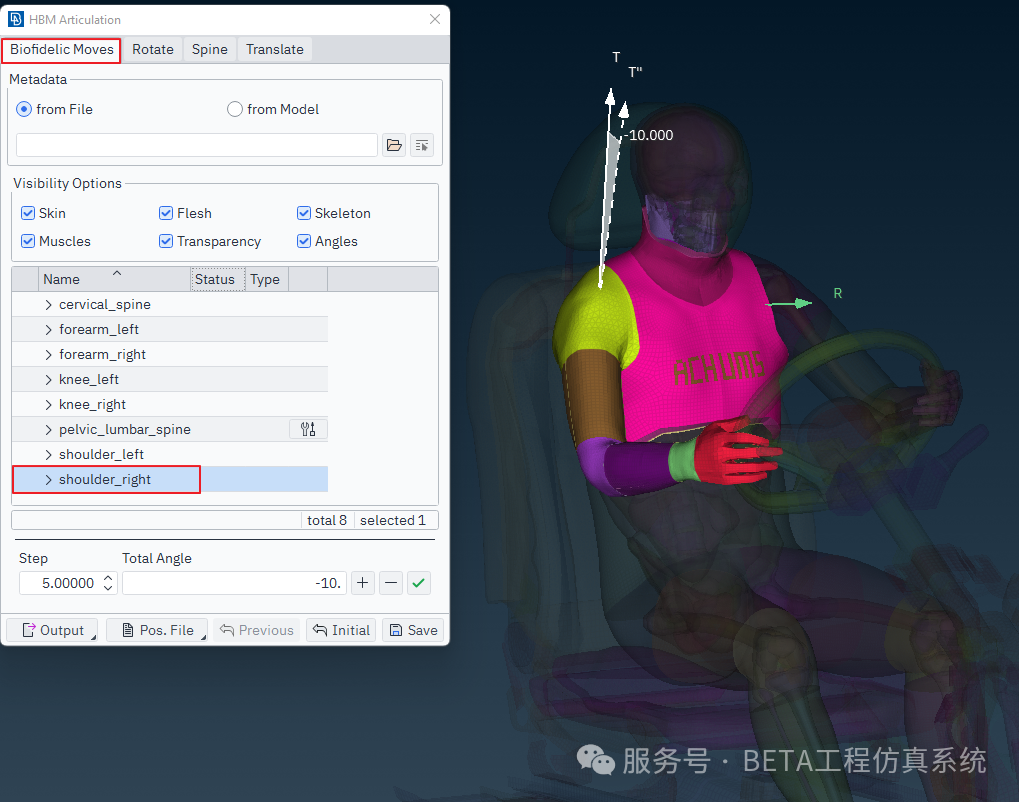
图8 肩部调节
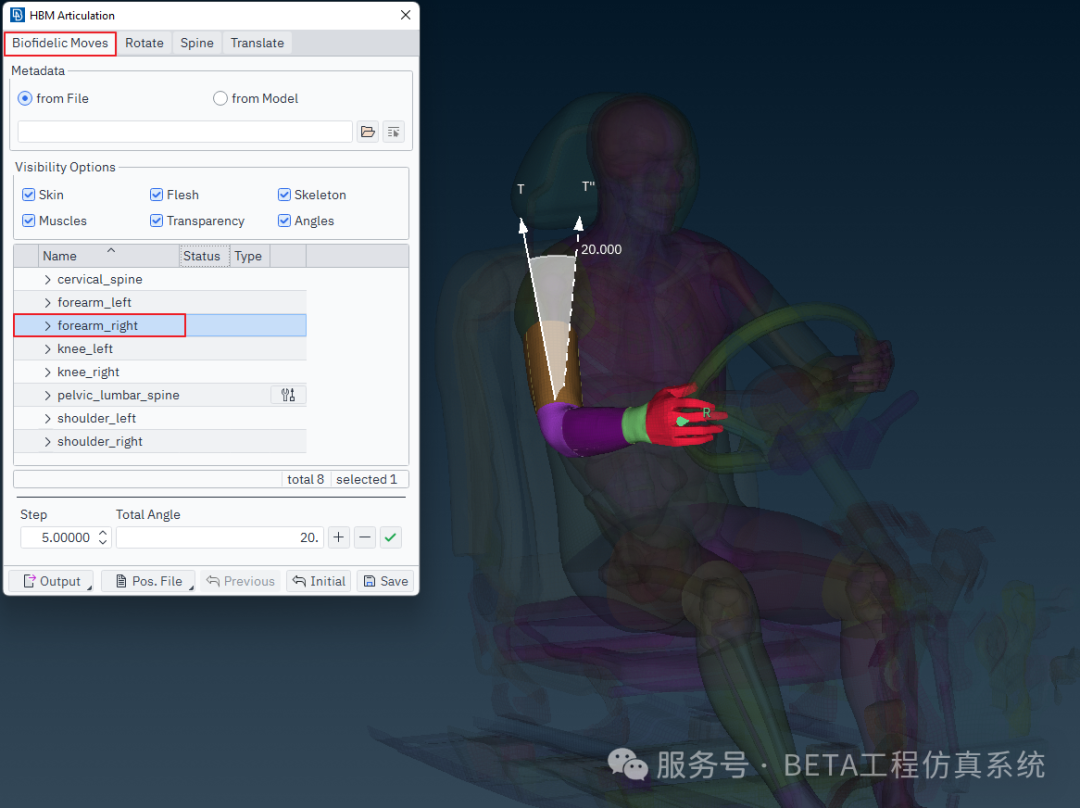
图9 肘部调节
步骤 7
去到Rotate界面,找到glenohumeral_joint关节,逐级进行微调,在选择某个关节后,模型会高亮运动部位和目前选定的旋转轴,直接点击鼠标左边拖动即可实现交互式调整,这个方式能够非常高效的实时看到旋转后的位置。值得注意的是,该工具支持手指各个关节的调整,最终能够实现非常高生物逼真度的手部位置定位,能够非常好的模拟握住方向盘的姿势。
重复步骤6、步骤7,即可完成两个手部的定位。
图10 手腕调节
图11 上躯干最终姿态
步骤 8
接下来进行下半身的定位,首先在Rotate界面中使用acetabulofemoral_joint_tree关节进行大腿的调整。同样建议使用交互式操作定义角度,能够实时看到大腿腿骨旋转的位置,更好的把握调整的姿态。另外,可以激活Both Legs选项,能够对左右大腿进行同等角度变化的旋转。

图12 大腿调节示意图1
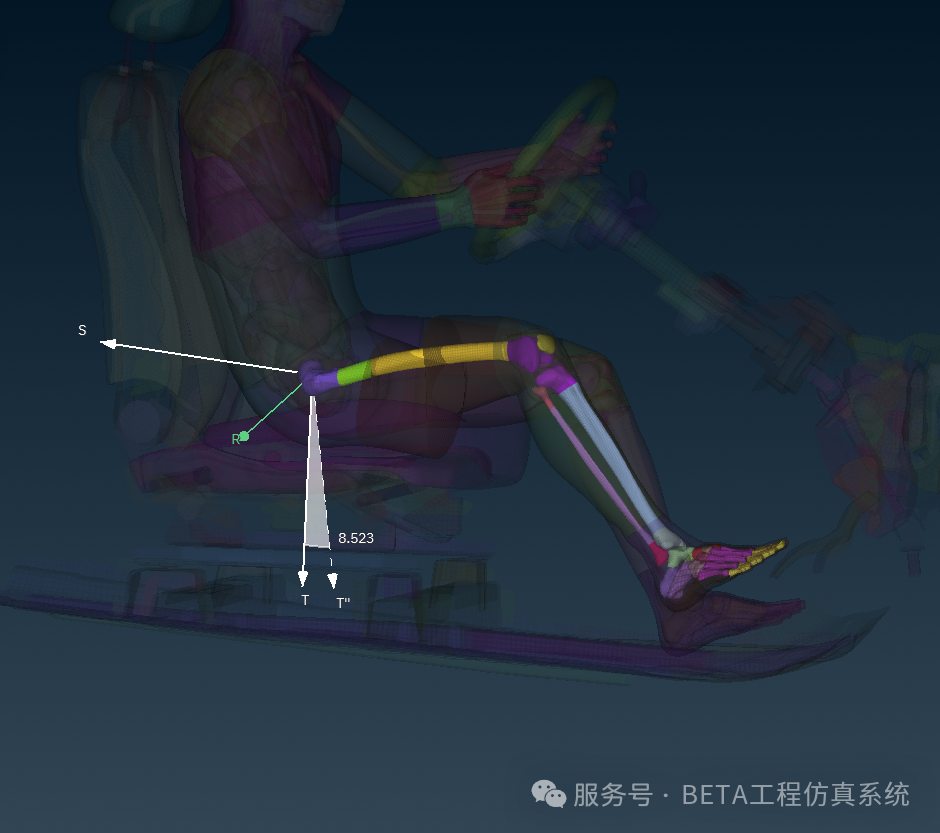
图13 大腿调节示意图2

图14 大腿调节示意图3
步骤 9
首先是膝部定位,在定位完毕大腿位置之后,可以去到Biofidelic Moves中找对对应的Knee关节通过输入角度进行调整。在本示例中需要伸展膝盖以实现脚部放置在油门踏板的需求,所以输入了8°进行抬起。
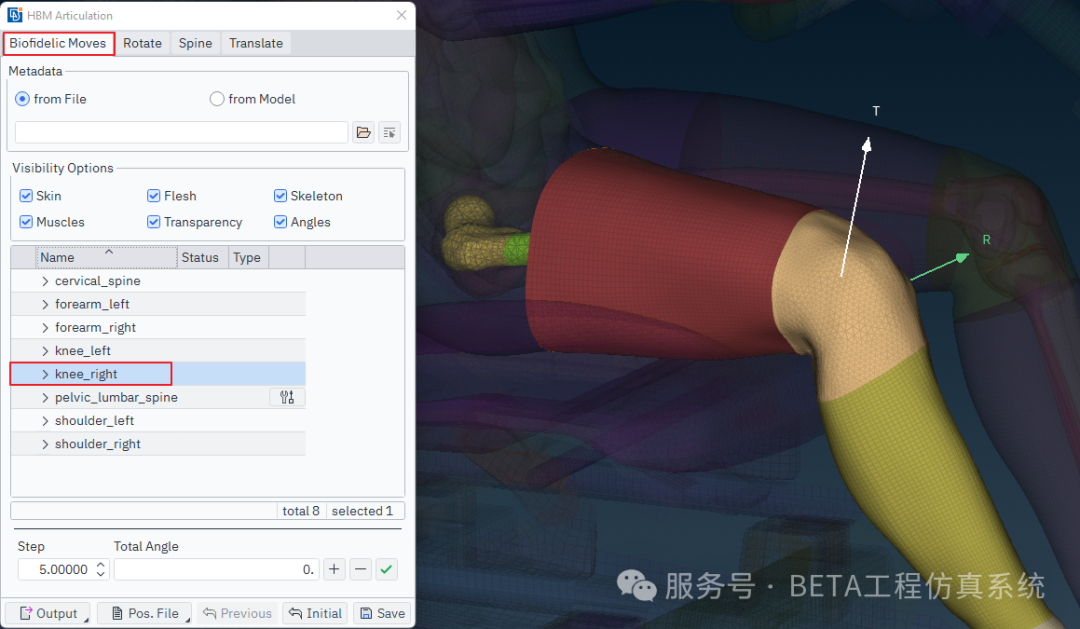
图15 膝部调节
步骤 10
调整完膝部角度后,去到Rotate界面进行脚踝定位。找到acetabulofemoral_joint关节下面的talocrural_joint关节,该关节用于调整脚踝定位。通过三个不同的旋转轴运动能够很好的模型真实脚踝的运动情况。在本示例中对右脚踝的R轴输入-10°进行抬起,模拟右脚放置在油门踏板的操作。
重复步骤9、步骤10,即可完成左右腿部定位。
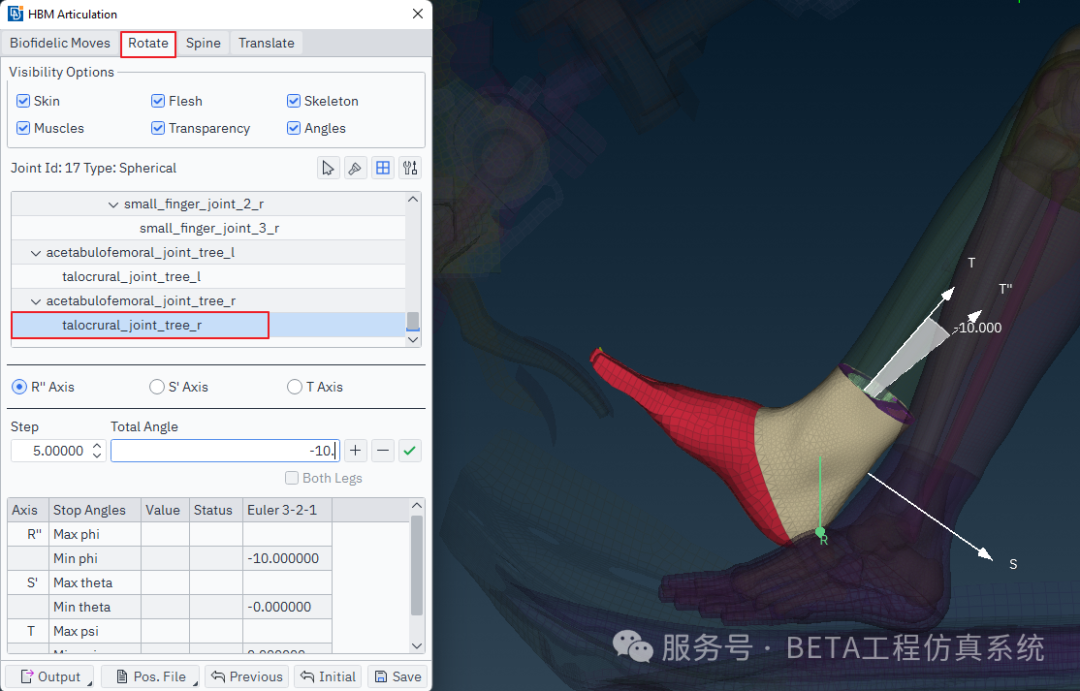
图16 脚踝调节
通过人体模型姿态调整工具实现的最终姿态如下,调整了脊柱和颈椎曲度,手部放置在方向盘并实现握紧姿势,脚部分别放置在油门踏板以及地板上面。
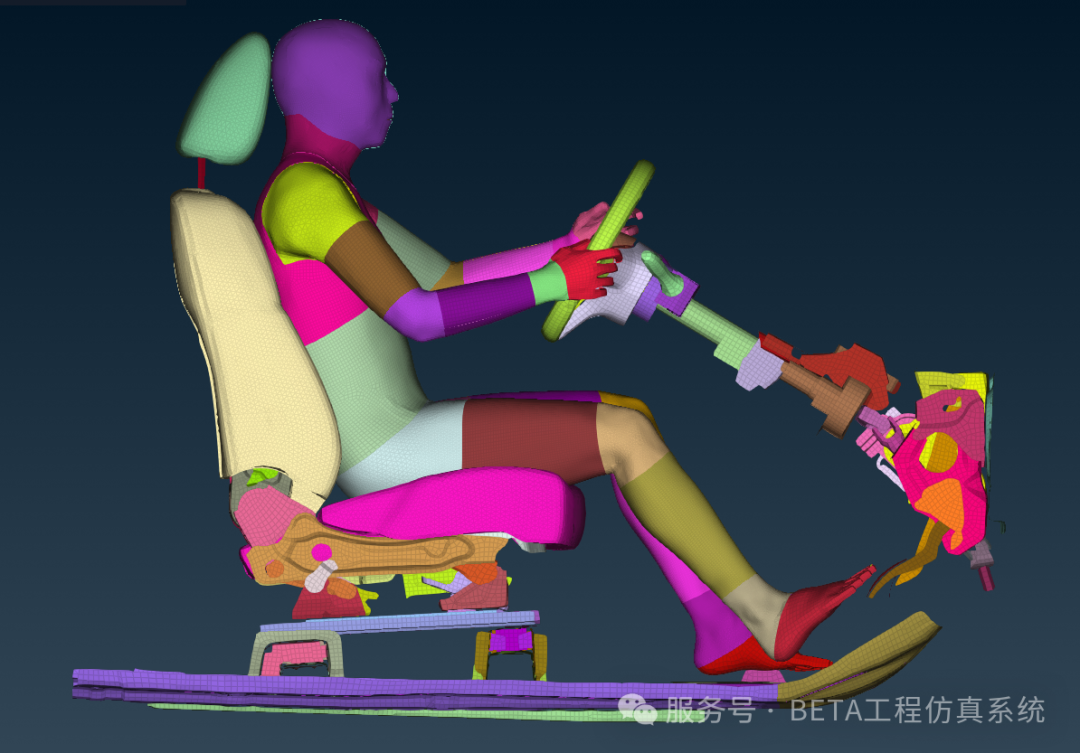
图17 最终姿态右侧图

图18 最终姿态正面图
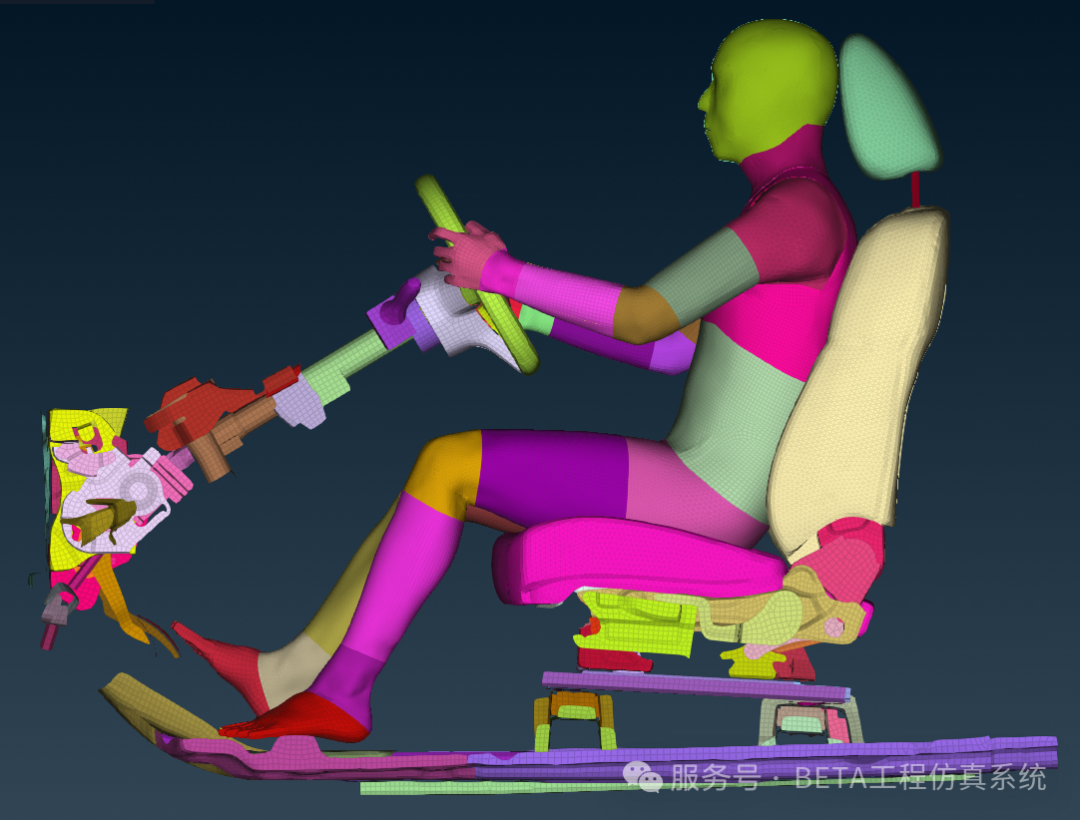
图19 最终姿态左侧图
最后,定位完成后可以点击Output>Node Keywords输出单独的k文件,只包含最终位置的节点位置信息,方便用户通过Include文件的方式进行姿态的管理。或者点击 Save在ANSA中保存多体动力学关键字KIN_POSITION,可以在ANSA中自如的切换初始与当前位置。

图20 输出节点位置信息
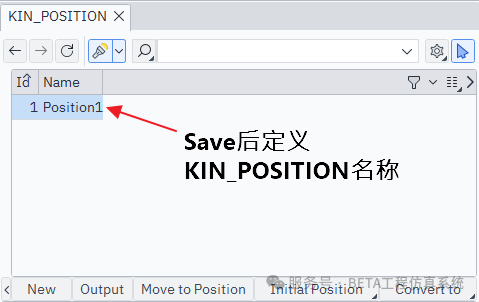
图21 保存在ANSA的多体动力学关键字
总 结
ANSA 的 人体模型姿态调整工具 (HBM Articulation Tool) 得益于内置的先进网格变形算法以及多体动力学求解器的支持, 用户可以在ANSA中快速高效定位 HBM 并操控其肢体。可通过鼠标交互或数值输入实现操作。屏幕上的图形信息为用户提供完成任务所需的重要数据,如肢体的旋转轴、止动角度和当前旋转角度等。相较于传统预仿真方式,能够极大的提高工作效率,并且以十分精准且高生物逼真度的结果呈现,后续还可以配合ASNA其他工具处理与座椅之间的穿透接触。
作者 | 黄涛
BETA CAE 工程师
- 雷科电力-REKE-5A大地网接地电阻测试仪
- 海阔千帆竞 潮涌自贸港——海南自由贸易港即将封关启新程,海阔千帆竞 潮涌自贸港——海南自由贸易港即将封关启新程
- 润石科技推出超低噪声自稳零运算放大器RS8547/RS8548
- 进博会“全勤生”再发力:三星首款Micro RGB电视推动显示行业迈向微米级时代
- 中绿电召开2025年半年度业绩说明会
- 吉事励DCL-R系列大功率可调负载箱:精准模拟,稳定可靠
- 丽尚国潮荣膺2025财联社“最佳投资者关系团队奖”
- 倾佳电子为客户提供碳化硅MOSFET样品申请及PLECS器件仿真模型文件
- 不同电压等级对应的隔离电压底线是多少?
- 华为赋能 + 黑科技亮相!希影投影仪闪耀南山羽企同行展会,林丹为决赛冠军颁奖
- 亚成微荣膺第五批陕西省制造业单项冠军企业称号
- 电能质量在线监测装置的暂态事件记录的事件记录容量是多少?
- 精准维修:安捷伦N6701A模块化电源系统主机深度修复与校准
- 针对用电设备安全,安科瑞AIM-D100系列直流绝缘监测仪产品方案科普
- 深入解析ADC12L066:高性能12位A/D转换器的全方位指南
- 低功耗+强适配!YSN8563MS RTC+YST310S晶振,打造智能门锁计时黄金组合